Recall that an integral element of an exterior differential system at is a subspace such that for every . Integral elements are the candidates for tangent spaces to integral manifolds.
Definition (polar space). Let be a -dimensional integral element of an EDS . Its polar space is the set of vectors such that the subspace is also an integral element. Equivalently,
The polar space is a linear subspace of defined by the linear equations obtained by plugging into the forms of (filled with the vectors of ).
Basic properties.
— every vector already in trivially extends to a larger integral element.
always, with equality iff is maximal (no larger integral element contains it).
If is an integral element, any -dimensional integral element that contains must satisfy .
The flag of polar spaces
Let be a flag of integral elements, with . (In practice, is an -dimensional integral element, the tangent space to an -dimensional integral manifold.) The polar spaces satisfy a descending flag:
Why descending? The larger the integral element , the more vectors satisfy the linear conditions that define — the polar equations become more restrictive. Thus shrinks as grows.
Cartan characters
For a flag in general position (a regular flag), define the integers
called the Cartan characters. We have:
: The number of restrictions imposed by the 1-forms in your ideal to find the initial polar space .
: The number of new restrictions imposed by the 2-forms (evaluated on a generic vector ) to find .
: The number of new restrictions imposed by the forms to find .
...
: The number of new restrictions added when extending a generic -dimensional integral element to a -dimensional one.
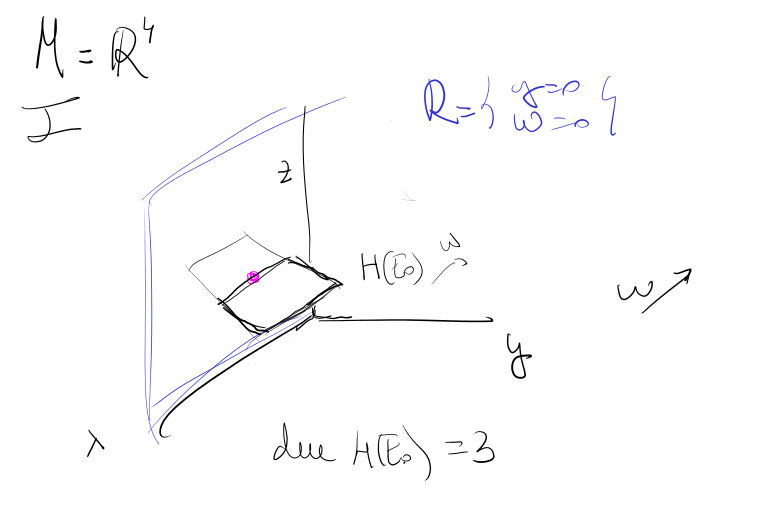
Consider an ambient manifold as a 4-dimensional space (), and a given differentially closed ideal . We start with a 0-dimensional manifold to be extended to a 1D integral manifold . We will assume (see @bryant1999nine). That is, .
Step 1: Where is the freedom of choice?
We have massive freedom to decide how to extend our point into a curve. Bryant handles this freedom immediately by asking us to choose a generic codimension- submanifold that contains our point . So, is an arbitrary 2D surface passing through our point .
(xournal 287)
Think of the immense freedom here: you have a single point in a 4-dimensional room. You can choose infinitely many different 2D sheets (surfaces) that pass through that single point. Choosing which 2D sheet to place down is exactly where you make your choice of how to extend the point.
In general, the dimension of is established in such a way that we can determine our desired integral manifold by using the restrictions. So . In this case, since , we are assuming , so is, as we know, a surface.
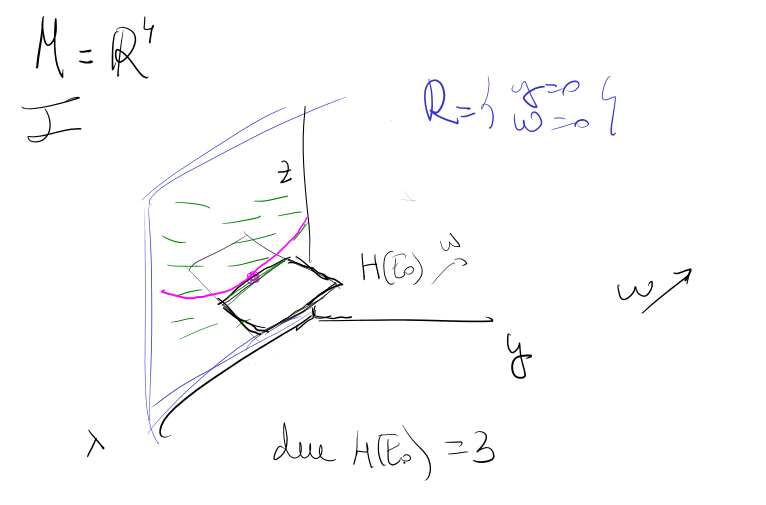
Step 2: What are the unknowns and how do we write the PDE?
We want to find a 1D curve trapped inside that starts at our point . Let's set up a local coordinate system on our 2D sheet :
We can place the origin exactly at our starting point .
is our "time-like" parameter. Moving in means moving forward along our curve.
is the other coordinate on the sheet. In general, we would have additional coordinates.
Since our target is a 1D curve on a 2D sheet, we can express the curve locally as a graph:
Thus, the unknown is a single-variable function . Our initial condition (the point ) is simply:
Because we are looking for a -dimensional manifold, we look at the 1-forms (differentials) in our system. We have one 1-form equation, because we started in 4D and we assumed that (in general we would have restrictions, the same as the number of unknowns!). Let's call it .
Because is defined everywhere on our 2D sheet , it can be written generally in terms of our coordinates and :
Where and are known, fixed functions given by the system.
We want our curve to satisfy this equation, so we have
Because we chose a generic sheet , the geometry guarantees that . Therefore, we can isolate the derivative:
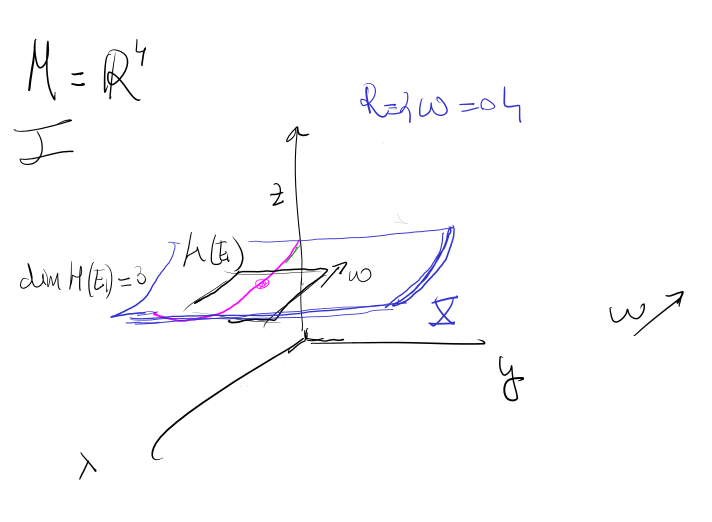
Fase 2: extending a curve into a surface
To match Bryant notation, we call the curve . Now, assume we have , since generically we had .
In this case, we fix a codimension 1 hypersurface , so we remove the degree of freedom. We take local coordinates for , let's say , chosen in such a way that is our curve .
The target surface can be seen as a graph , and we impose the constraints of to this function. In this case we do not have new 2-forms, only those coming algebraically from the 1-forms in . So if the only independent 1-form were , then we use , with a generic 1-form. In the general case, we would have independent 2-forms.
Suppose that . Then,
And we can isolate
which is in Cauchy form. This, together with the initial data , assures the existence of solution.
Fase 3: general extension
Let be our existing -dimensional integral manifold, and let be our starting point. We build our restraining manifold to have dimension . Let's choose local coordinates on that are perfectly adapted to this geometry:
: Coordinates running along the existing manifold .
: The coordinate for our "new" independent direction of growth.
: The remaining coordinates on , which represent our unknown functions.
In this coordinate system, the old manifold is sliced out simply by setting and . We are looking for the expanded -dimensional manifold , which we can write as a graph:
For to be an integral manifold, all the -forms in our exterior differential ideal must pull back to zero on . And we can select, precisely, independent -forms whose annihilation ensures that all the -forms are zero (why?). Moreover, we can isolate from them (why?):
This is exactly the Cauchy--Kowalevsky normal form. A unique real-analytic solution exists locally, successfully extending our manifold to dimension .
To check if the system is well-behaved (involutive) at dimension , you must calculate the expected dimension () of the space of -dimensional integral elements, (subset of the corresponding Grassmannian manifold). Indeed, since translates to polynomial equations in the Plücker coordinates of the Grassmannian, is al algebraic subvariety.
The formula for this expected dimension is:
(Note: is intentionally completely absent from this sum! simply defines the "base" hyper-plane you are trapped in, while dictate the actual degrees of freedom you have left when rotating an -dimensional plane inside that base space). See xournal 283
Once you have your expected dimension, you compare it to the actual dimension of (the actual number of parameters or degrees of freedom you have left to choose a valid -plane).
The test states that the system is in involution if and only if:
Why do we calculate this? (The Cartan-Kähler Theorem)
If the test passes, not only do integral manifolds exist, but the characters give you the "size" of the general solution! If the system is in involution, the general solution will depend on:
arbitrary functions of variables.
If , you look at the previous character. The solution will depend on arbitrary functions of variables.
And so on.
Relation to other concepts
The polar space is closely related to the Cauchy characteristic space: Cauchy characteristics of an EDS are precisely the vectors belonging to for every integral element .
For a Pfaffian system, the polar equations simplify considerably: is defined by the vanishing of the 1-forms generating , evaluated on vectors.
The descending flag of polar spaces mirrors, in a dual sense, the ascending flags appearing in cinf-structure and flags for distributions.
References
@bryant2013exterior, Chapter III — the definitive reference on Cartan-Kähler theory.
@ivey2016cartan, Chapter 4 — a more computational treatment with many examples.