Tema 3. Interpolación y aproximación de funciones
- 1. Introducción
- 2. Diferencias Divididas de Newton
- 3. Interpolación de Hermite
- 4. Overfitting
- 5. Ejercicios
1. Introducción
En muchas ocasiones, tras realizar medidas experimentales, obtenemos una tabla de datos para una función en la forma:
| x | y |
|---|---|
| ⋮ | ⋮ |
| Frecuentemente, necesitamos más información de la función: |
- Aproximación analítica.
- Estimación de derivadas en los puntos conocidos.
- Estimación del valor de la función en puntos no tabulados.
En este tema, veremos algunos métodos básicos para determinar estas aproximaciones.
2. Diferencias Divididas de Newton
Una forma de calcular el polinomio de menor grado que pasa por una serie de puntos dados es plantear un sistema de ecuaciones lineales.
Una forma rápida de obtenerlo es usar la fórmula del polinomio de Lagrange. El principal inconveniente de la fórmula de Lagrange es que si añadimos un nuevo punto
Por eso vamos a estudiar mejor el método de las diferencias divididas de Newton. Partimos de un conjunto de puntos de la forma:
y definimos:
- Diferencias divididas de orden 0:
- Diferencias divididas de primer orden:
- Diferencias divididas de segundo orden:
- Diferencias divididas de orden
:
El polinomio de interpolación en términos de las diferencias divididas es:
El cálculo de las diferencias divididas puede llevarse a cabo de forma sencilla mediante la construcción de una tabla. Por ejemplo, si tenemos
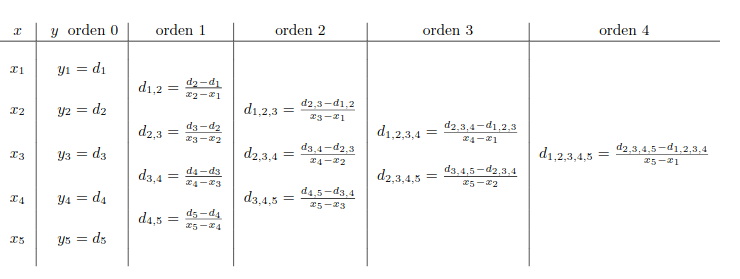
El polinomio de interpolación tiene la forma:
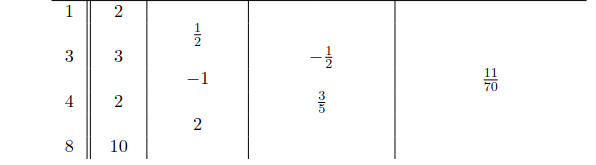
Ejemplo
Dados los puntos (1, 2), (3, 3), (4, 2) y (8, 10), se quiere obtener el polinomio interpolador que pasa por ellos. Hallarlo por medio de las diferencias divididas de Newton.
Aproximación de funciones
Otra aplicación de la interpolación de Newton es que nos permite aproximar una función complicada por otra más sencilla. Si tenemos una función
el polinomio de interpolación de Newton nos proporciona una aproximación de
Ejemplo
Dar una aproximación de la función
Datos:
- x: [0, 1, 4, 9]
- y: [exp(√0), exp(√1), exp(√4), exp(√9)] = [1.000, 2.718, 7.389, 20.086]
| 0.000 | 1.000 | 1.718 | -0.040 | 0.018 | |
| 1.000 | 2.718 | 1.557 | 0.123 | - | |
| 4.000 | 7.389 | 2.539 | - | - | |
| 9.000 | 20.086 | - | - | - |
Polinomio de Newton:
Simplificando el polinomio, obtenemos:
Y
3. Interpolación de Hermite
En algunas ocasiones, además de los valores de la función, también tenemos el valor de la derivada en los puntos. Es decir, tenemos una tabla de la forma:
| x | y | y' |
|---|---|---|
| ⋮ | ⋮ | ⋮ |
En este caso, intentamos aproximar la función por un polinomio que satisfaga:
Este polinomio recibe el nombre de polinomio de interpolación de Hermite, tiene grado, como máximo
- Primera columna: Incluimos los números
, definidos como: - Segunda columna: Diferencias divididas de orden 0:
- Tercera columna: Diferencias divididas de primer orden:
Impares
Pares
$$
d_{2i,2i+1} = \frac{d_{2i+1} - d_{2i}}{z_{2i+1} - z_{2i}}, \quad i = 1, 2, \ldots, n - 1.
$$
- A partir de la cuarta columna: Se construyen como las diferencias divididas de Newton.
El polinomio de Hermite viene dado por:
Ejemplos
Ejemplo 1. Calcular el polinomio de Hermite que interpola la tabla de datos:
| 0 | 1 | -1 |
| 1 | 0 | 1 |
| 2 | 3 | -1 |
Tabla de diferencias divididas:
| Primera diferencia | Segunda diferencia | Tercera diferencia | Cuarta diferencia | Quinta diferencia | ||
|---|---|---|---|---|---|---|
| 0 | 1 | -1 | 0 | 2 | -1 | -1 |
| 0 | 1 | -1 | 2 | 0 | -3 | |
| 1 | 0 | 1 | 2 | -6 | ||
| 1 | 0 | 3 | -4 | |||
| 2 | 3 | -1 | ||||
| 2 | 3 |
- Construir el polinomio:
- Usando las diferencias divididas, el polinomio de Hermite es:
Simplificando, obtenemos:
Ejemplo 2. Un ingeniero aeronáutico está modelando la trayectoria de descenso de un avión antes de aterrizar. Se quiere estimar la altura del avión en función de la distancia hasta el inicio de la pista.
Se tienen las siguientes mediciones:
- A 1000 metros antes de la pista, el avión está a 2000 metros de altura, con una velocidad de descenso de -3 m/m (metros por metro recorrido).
- A 500 metros antes de la pista, el avión está a 480 metros de altura, con una velocidad de descenso de -2 m/m.
Se pide:
a. Construir el polinomio de interpolación de Hermite que modele la altura del avión en función de la distancia hasta la pista.
b. Usar el polinomio para estimar la altura del avión a 750 metros antes de la pista.
4. Overfitting
El overfitting ocurre cuando un modelo se ajusta demasiado a los datos, capturando ruido y perdiendo capacidad de generalización, lo que suele suceder con polinomios de alto grado que generan oscilaciones no deseadas. Sus causas incluyen el uso de polinomios excesivamente complejos, la presencia de ruido en los datos y una mala extrapolación que conduce a predicciones incorrectas. Para evitarlo, se recomienda usar polinomios de menor grado o splines, elegir nodos de Chebyshev, optar por aproximaciones en lugar de interpolaciones y aplicar regularización para suavizar el modelo, equilibrando así ajuste y generalización.
5. Ejercicios
-
En una estación de metro pasan convoyes cada 10 minutos durante las primeras horas de la mañana. A las 8:00 suben al convoy 30 personas, 26 a las 8:30 y 21 a las 9:00. Estima (usando el polinomio de interpolación de Newton) cuántas personas suben a las 8:20.
-
Se considera la función
.
- (a) Utilizar el método de diferencias divididas de Newton para calcular el polinomio de interpolación de los puntos
, y . - (b) Utilízalo para dar una aproximación de
y calcular el error cometido.
- Se consideran los puntos
, , , y .
- (a) Calcular el polinomio de interpolación de los puntos
usando las diferencias divididas de Newton. - (b) Utilizar las diferencias divididas del apartado anterior para calcular el polinomio de interpolación de los puntos
.
- Consideremos la función
.
- (a) Utilizar el método de las diferencias divididas de Newton para calcular su polinomio de interpolación en los mismos puntos.
- (c) Calcular el error cometido al considerar el valor
como aproximación de .
- Se considera la función
.
- (a) Calcular el polinomio de interpolación de Hermite en los puntos
, , . - (b) Dar una aproximación de
.
- Consideremos la función
.
- (a) Utilizar el método de las diferencias divididas de Newton para calcular su polinomio de interpolación en los mismos puntos.
- (c) Aproximar
.
- Sea
.
- (a) Utilizar el método de las diferencias divididas de Newton para calcular su polinomio de interpolación en
, , , . - (b) Utilizar el polinomio de interpolación de Hermite en los puntos
y .
- Sea
.
- (a) Calcular el polinomio de interpolación de Hermite en los mismos puntos que antes.
- (b) Obtener la aproximación del valor
.
- Dada la función
.
- (a) Hallar el polinomio de interpolación de
sobre el conjunto de puntos , , , y , mediante el método de las diferencias divididas de Newton. - (b) Usar dicho polinomio para calcular un valor aproximado de
. Hallar una estimación del error cometido.
-
Utilizar el método de Hermite para hallar un polinomio
que satisfaga , , y . -
Calcular
a partir de una aproximación de la función con el polinomio de interpolación de Hermite en los puntos y . -
Calcular el polinomio de Hermite que interpola la siguiente tabla:
| x | y | y' | |
|---|---|---|---|
| -1 | 5 | 12 | |
| 0 | 2 | -7 | |
| 2 | -40 | -51 |