Given a vector space , we define as the space of linear mappings from to (linear forms). Given a basis in , we call the set the dual basis, where the are forms satisfying:
No natural isomorphism
At a first glance, there is no natural isomorphism between and . But if we have in an inner product, we automatically do have a natural isomorphism from into :
And reciprocally: given an isomorphism we recover a bilinear form (not necessarily an inner product), which is non degenerated. Given we can define
by means of
But you can argue that we have a natural isomorphism: the one which sends to . But it is needed to fix a basis. In this case, the bilinear for associated is the one with matrix in the basis .
So in a vector space is equivalent:
Fixing a basis
Fixing an non degenerated bilinear form.
Fixing an isomorphism with its dual, with conditions.
Moreover, the original inner product induces another on . This can be seen "by hand" or by considering that, just as there is a correspondence between inner products on and isomorphisms from to , there is also a correspondence between inner products on and isomorphisms from to . But since , the sequence is as follows: the inner product induces the isomorphism , and because is also an isomorphism, it induces an inner product on .
Moreover, the inner products and are inverse, in the sense that for a vector
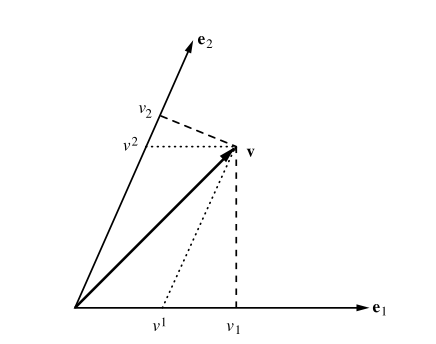
Let . It is clear that it has a correspondent such that . We write and call it the covariant components of , while are the contravariant ones. Since has an inverse, we can recover the contravariant components from the covariant ones: . Using the matrix form of and respect to the chosen basis we would write