Cauchy stress tensor
It belongs to the realm of Continuum Mechanics, but also it is related to the energy-momentum tensor.
Bodies usually have internal forces due to the interactions between their constituent particles. These forces, distributed throughout the material, arise when the body is subjected to external loads, such as forces or displacements, or when there are internal factors like thermal expansion or phase changes. The Cauchy stress tensor is a mathematical model that describes how these internal forces are distributed over a material's surface, offering a detailed account of the internal state of stress at any given point within the body.
It is a
More specifically, the vector
If we choose coordinates we have:
The diagonal elements of the stress tensor (
: The normal stress in the -direction, acting on a surface element with a normal vector pointing in the -direction. : The normal stress in the -direction, acting on a surface element with a normal in the -direction. : The normal stress in the -direction, acting on a surface element with a normal in the -direction.
If these normal stresses are compressive (i.e., acting inward), they are typically associated with pressure or compressive stress
The off-diagonal elements (
Examples
Gas in equilibrium
The Cauchy stress tensor
where
appears on the diagonal, representing the compressive normal stress due to the gas pressure. - The off-diagonal elements are zero because, for an isotropic medium like a gas at equilibrium, there are no shear stresses.
One direction tension
Another simple example of a Cauchy stress tensor is that of a uniaxial tensile stress, where a material is stretched along one axis (say, the
Suppose a metal bar, with all its atoms in equilibrium. Then the Cauchy stress tensor would be
But if the material is subjected to a tensile force along the
Here:
represents the tensile stress in the -direction. - The normal stresses
and are zero because there is no force in the - and -directions. - The off-diagonal components (shear stresses) are also zero since the force is purely normal and there is no sliding between layers of material.
Relation to force experienced by a body element
The Cauchy stress tensor provides information about the internal forces within the material and how they vary across different directions at each point. This allows for the determination of how the material will respond to these forces, leading to its deformation.
The general approach is to use the Cauchy stress tensor in conjunction with the equations of motion (or equilibrium in static cases), which are derived from the balance of linear momentum:
where:
is the Cauchy stress tensor, is the external force per unit volume (e.g., gravity), is the mass density, is the acceleration field.
Simulation
See Mathematica 019. But it is wrong...
Old stuff, probably it should be erased
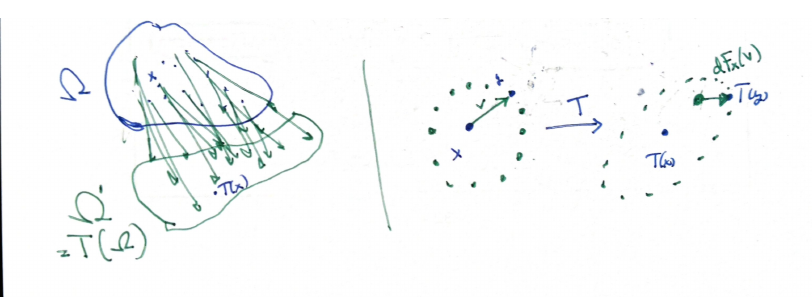
This is a topic that is halfway between Physics and Engineering. We are going to deal, in a very simplistic approach, with how the 3D bodies get deformed, but we will alternate between 3D and 2D for visualization issues. Suppose we have a body that occupies a region of space
If we think of the transformation as being the resulting action of forces applied on the constituent particles of the body, and we assume that these particles were initially at rest (a solid) we can state that the forces in every point
for some constant
This is because we can look at
and since particles were initially at rest
where we are assuming, also, that the body has constant density
Studying the whole transformations is complicated, because of nonlinearity. So we should better take care of the local study of every point, assuming that the transformation is very small, as we usually do (it is the same simplification that we do when we pass from studying the curve described by a particle to the tangent vector of that curve). We can imagine that every point
since, as we observe in the picture on the right,
So, what is the physical meaning of
But now, since we concern only with deformations, it would be good if we can remove the rotation part (the translation part is removed by derivation), but this is allowed by the polar decomposition. We have that
where
So let's assume
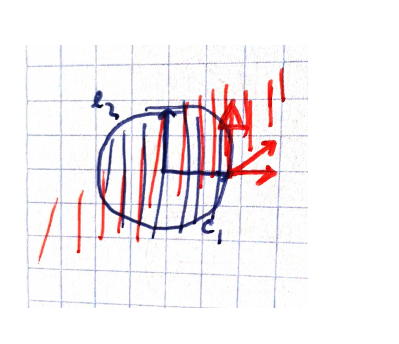
But what if we continue in our original basis? When we focus on a direction going out the center point, we assign a vector whose meaning is, again, the "deformation force" or "stress" that suffers the infinitesimal piece of the body around
Here is needed that you make a mental effort to see that you have the same deformation information that giving a special basis and two scalars meaning the scale change in every direction. Because the special basis itself has to be specified (in the plane case, angle), so you actually need three numbers. And on the other hand, the lateral displacement of the orthogonal planes to every main direction must be equal, as you can understand, intuitively, in the picture below (because there is no rotation!):
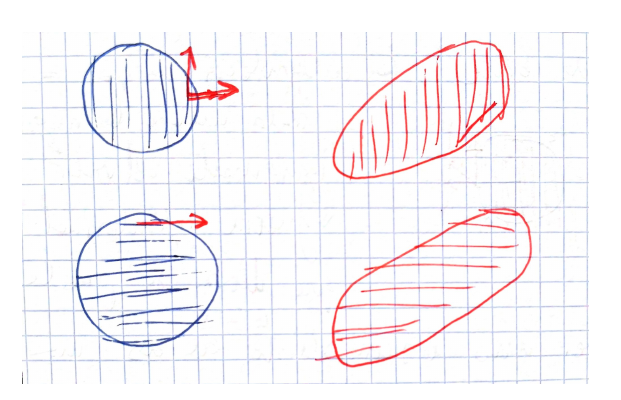
so you actually need tree numbers, again. This is the explanation that Cauchy tensor being symmetric.
Finally, only say that this is a very simple approach. Force and deformation are not so simply related, because it depends on the material we are using. But the important idea to get clear is that deformation is a new kind of information, not so simple like scalars and vectors. We need a tensor.