Is the same as Geometric Algebra, but from a different approach.
Let be a finite-dimensional real (complex) vector space with nondegenerate bilinear form . The (complex) Clifford algebra is the algebra generated by along with the anti-commutation relation
or equivalently with the relation . Note: the Clifford algebra can be seen like coming from the tensor algebra. The Clifford algebra is the quotient of by the ideal , generated by the elements of the form . This ideal is also generated by . If you take (u+v)⊗(u+v) = u⊗u + u⊗v + v⊗u + v⊗v we have: g(u+v,u+v) = g(u,u)+ u⊗v + v⊗u + g(v,v), and since g(u+v,u+v) = g(u,u) + g(u,v) + g(v,u) + g(v,v), this gives us: u⊗v + v⊗u = g(u,v) + g(v,u) = 2 g(u,v).
If the signature of is , then we use the notation
or
Note: If , then belong to the subset of denoted by .
Example. is a four-dimensional algebra spanned by which behave like quaternions (note that this is not the only way to see quaternions in the framework of Clifford algebras).
Example: Pauli vectors constitute a representation of the Clifford algebra , since they satisfy
It is called the Algebra of Physical Space (APS). Its matrix representation is given by the Pauli matrices. It is related to Pauli spinors
Example: The Clifford algebra is called the Spacetime Algebra (STA) and it is related to the Weyl spinors. See Spacetime Algebra.
Grade involution or inversion. Every vector goes to the opposite, . Then, for a general multivector
In general, the total space splits into and , composed of even and odd multivectors respectively.
Reversion.
Clifford conjugation.
The spin group and the spinors
Inside the Clifford algebra we can find the spin group. These are subgroups of the group of units of the Clifford algebra. In particular, the Spin group, denoted as , consists of products of even numbers of unit vectors.
Observe that the operator defined via , and , is an element of ; and . So is a double cover of .
Given a minimal left ideal of , we can consider another operator
In the case (spatial rotations), consists of [Lounesto page 59]
where the tilde and the bar denotes reversion and Clifford conjugation [Lounesto page 56].
We can consider the action on
In the matrix representation given by the Pauli matrices, the group corresponds to .
But additionally, if we consider a minimal left ideal of , denoted by , then it is a vector space and we have a natural homomorphism
given by [TO BE COMPLETED with Lounesto page 60, for n=3] for and . We have, then, a group representation of called the fundamental representation via Clifford algebra, and the elements of are called spinors.
Change of basis
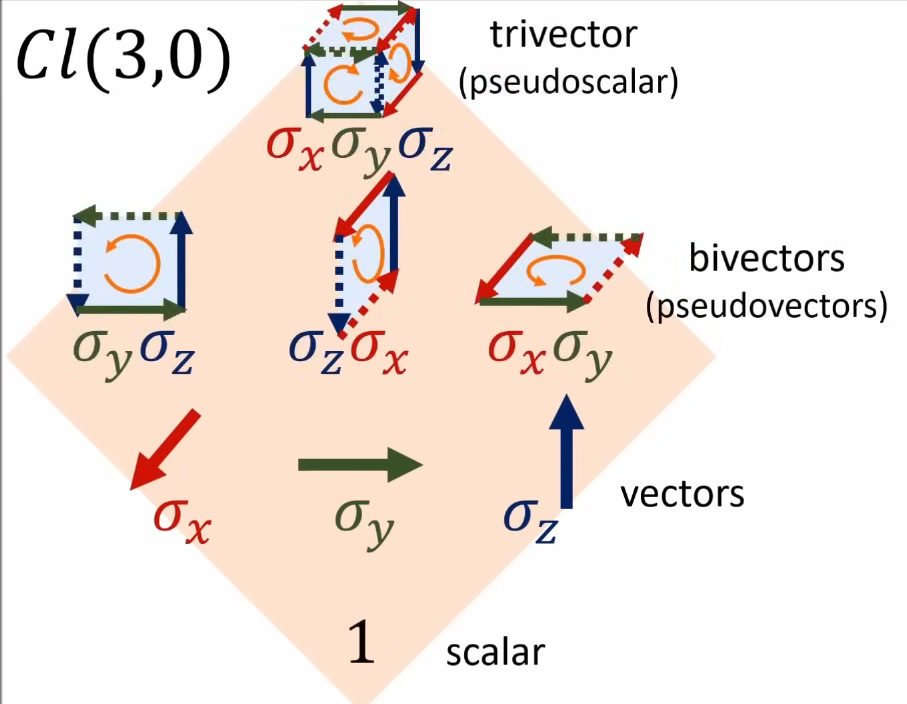
To understand the change of orthonormal basis in, for example, the Clifford algebra , we need to consider the structure of this algebra and how the basis vectors relate to each other. The Clifford algebra is the associative algebra generated by three orthogonal unit vectors , satisfying the relation for . The basis of consists of 8 elements:
Scalar: 1
Vectors:
Bivectors:
Trivector:
Now, let's consider another orthonormal basis for the same vector space. These vectors can be expressed as linear combinations of the original basis vectors :
Here, the coefficients form a 3×3 matrix , representing the change of basis from to . To transform an element in from the basis to the basis, we need to apply the change of basis matrix to each component of . Specifically, if we write as:
Then, is given in the basis by:
where the coefficients and are obtained by applying the matrix to the corresponding vector and bivector components of .
Let's study, for example, how to transform bivectors:
Base Representation:
Recall that each bivector transforms under the change of basis from to via:
where are the components of the matrix .
Transformation of Bivectors:
To find how a bivector such as transforms, consider:
Since the bivectors involving different indices are orthogonal (anticommute) and squares are scalar (since in three dimensions, ), this simplifies to:
Creating Transformation Matrix :
By performing a similar expansion for and , we construct each column of the transformation matrix corresponding to each bivector. This involves determining the coefficients for and as seen in the expansion. This results in a 3x3 matrix to transform bivectors.