It is dual to frame on a manifold.
It is an ordered set of 1-forms defined on an open set of an -dimensional manifold such that they span the cotangent space for every .
An ordered set define a coframe if and only if
for every ([Olver_1995]).
A global coframe provides, therefore, an orientation and a trivialization o , so it is also called absolut paralelism.
Generation of k-forms
A coframe not only generate any 1-form, but also any differential -form can be written as linear combination of -fold wedge products:
See [Olver_1995] page 254.
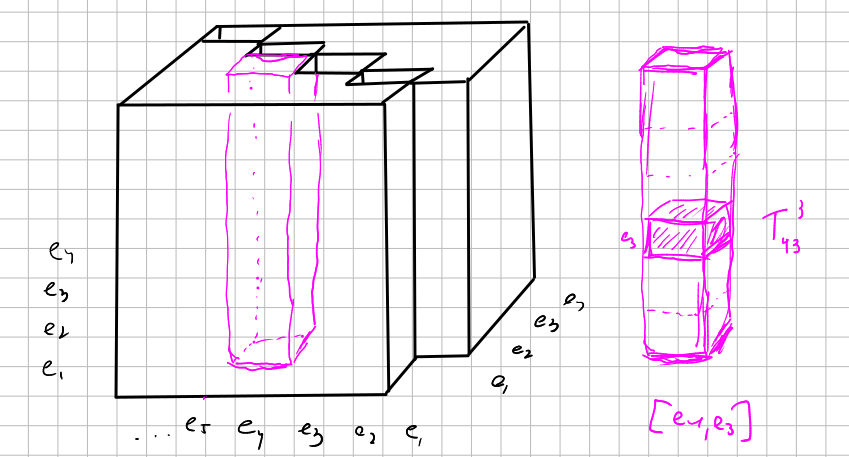
Duality with frames
A frame on a manifold and a coframe are dual if they are dual basis for every . Given a coframe, the dual frame will be denoted by
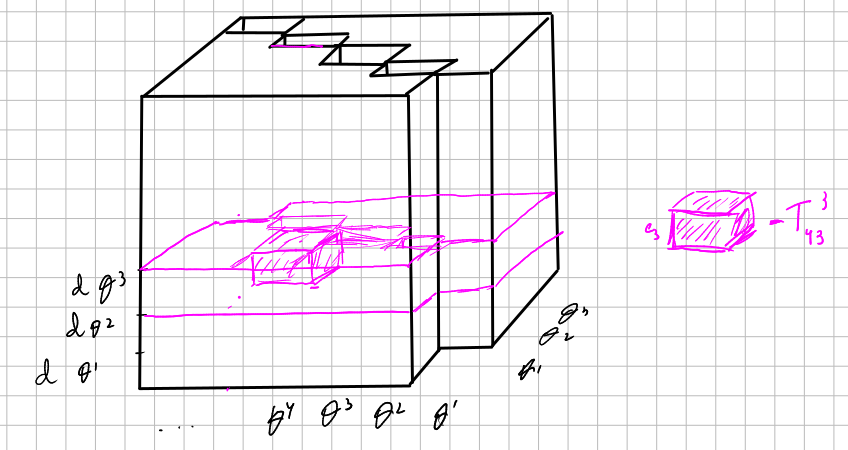
Given coordinates on the manifold, we have distinguished local frame and coframe denoted respectively by
and
Given a coframe any -form can be written as a linear combination
In particular,
expressions which are called structure equations of the coframe and are called structure coefficients. These equations are the dual version of