Exponential map
Motivation and general construction
(xournal_134)
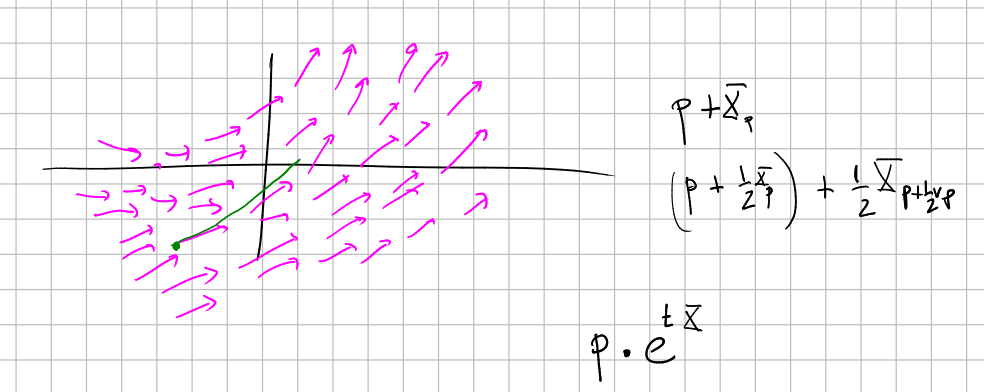
Given a manifold
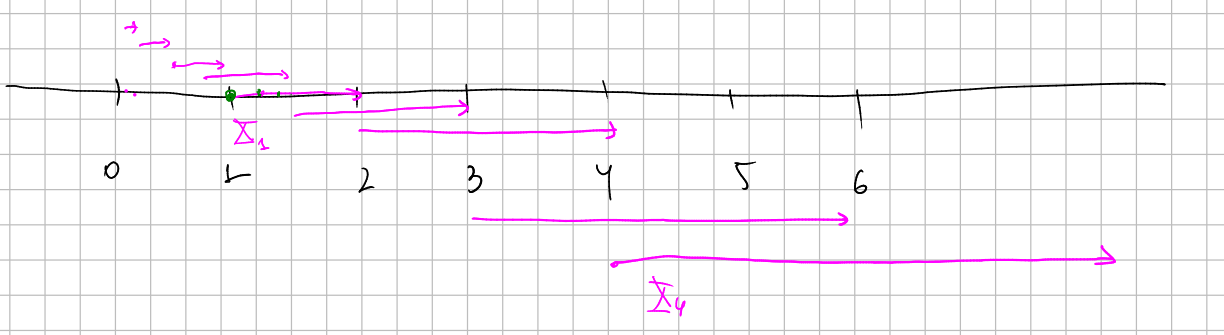
- we start at
and move a little along . That is, we compute . This is, obviously, not defined, but we take a blind eye. Also, we denote it by . This notation is justified because is, loosely speaking, an element of the Lie algebra of the "infinite dimensional Lie group" so we can think of as a little element of near to . - we move a little from
along the direction of , that is, we compute . - We finish approximately in
after 10 steps.
Observe that, abusing of notation,
Of course, we have had better precision if we do this in more steps. In the limit (steps
and is nothing but the flow of
This is a very general construction, which allows you to find curves with a prescribed velocity.
Particular case: usual exponential function
What has to do with the usual exponential function and, moreover, with the number
Then the number
That is, if you consider a curve
Particular case: matrix exponential
This general construction can also be particularized to the case of matrix exponential. Suppose that the manifold is
But since in this case
being
Particular case: any Lie group
Consider a Lie group
Then, if we consider the flow
With this set up, the exponential map is defined by
and is usually also denoted by
Since
The answer is yes. We can take
because of the uniqueness of the flow, since:
are integral curves of :
Particular case: Riemannian manifolds
If we have a Riemannian manifold
How does it fit in this framework? If we consider the manifold
Inverse relation with "differentiation"
It is important to note that
Therefore we have
expression that I like to call inverse relation between exponential and differentiation at the origin. In a sense, is like saying that exponentiation is like an "integration process" (see the picture of the section Motivation).
Local diffeomorphism of the Exponential Map
Consider the exponential map
along with its differential at
The differential is the identity map, which implies, by the inverse function theorem,
Global Behavior of the Exponential Map
It's essential to note that while the map acts as a diffeomorphism locally, its behavior can be different when viewed globally. Specifically:
- The exponential map may not be injective, which means distinct elements in the Lie algebra could end up mapping to the same element in the Lie group. This has to do with covering groups.
- The map might not be surjective. This implies there could be some elements in the Lie group that the exponential map cannot reach starting from the Lie algebra. Regarding the surjectivity we have two partial results:
Product Representation in
According to Proposition 1.24 in @olver86, any element
where each
Surjectivity of the Exponential Map
Proposition
For a compact connected Lie group
Proof
The proof is intricate, see:
https://terrytao.wordpress.com/2011/06/25/two-small-facts-about-lie-groups/