Weingarten map
(Generalization to hypersurfaces: Gauss' Equation#For hypersurfaces.)
(Better explanation in second fundamental form#Generalization to surfaces in 3-dimensional manifolds via moving frames.)
For immersed surfaces in R3
It is the differential of the Gauss map
For every
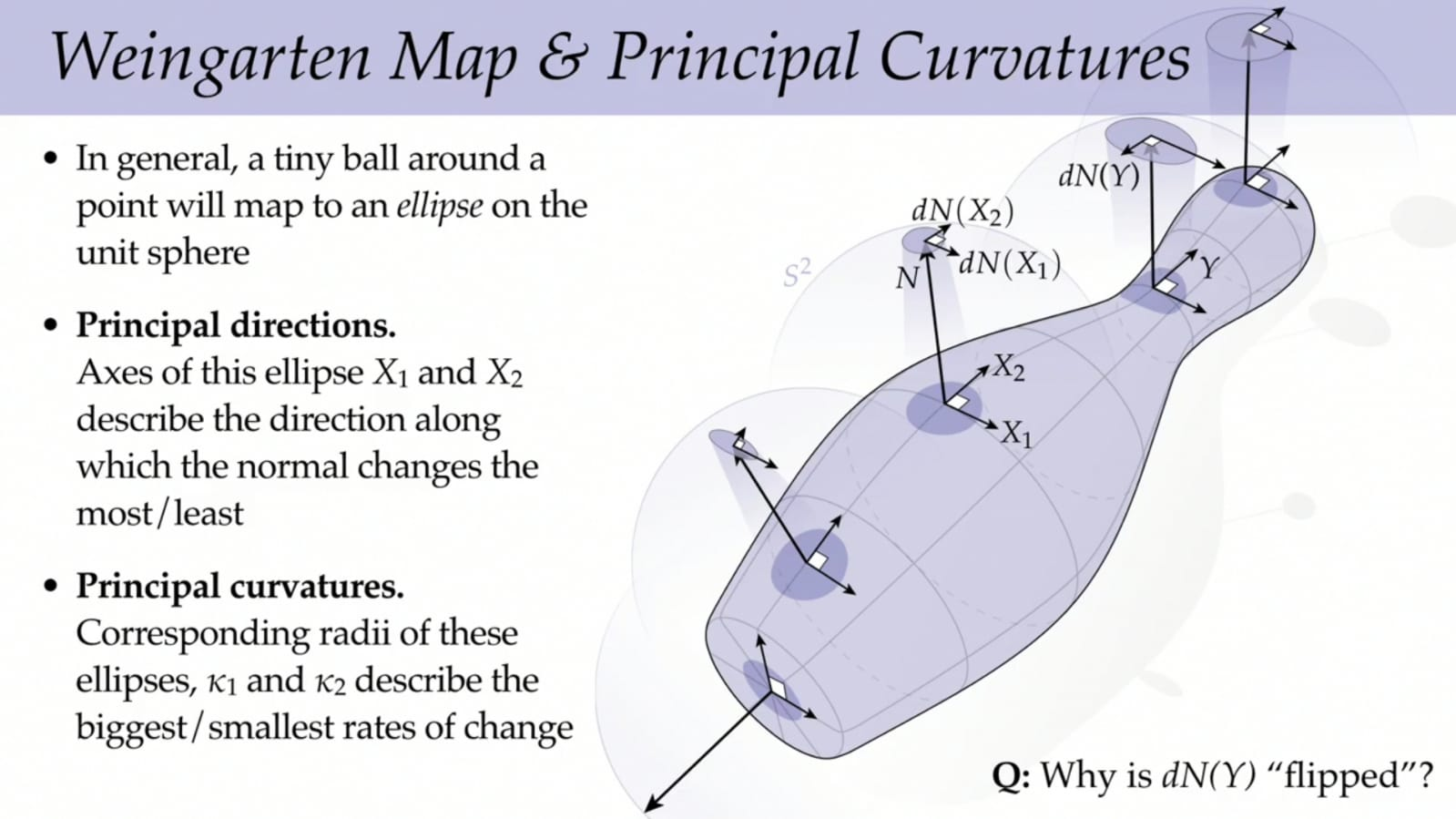
It let us to speak about principal directions and principal curvatures (see the picture below obtained from a Youtube video):
From the Gauss map we can define the normal curvature of an immersed surface.
The Weingarten map is related to the shape operator.