The group
Known as the Special Orthogonal Group. The Special Orthogonal Group is the subgroup of the O(3) consisting of those matrices whose determinant is exactly 1. It is the connected component of
The group is homeomorphic to the 3-dimensional projective space:
Composition of two 3D rotations is a new rotation
Two ways to visualize it:
- First of all, two reflections give rise to a rotation, the angle being the double of the angle formed by the planes defining the reflections. Reciprocally, a rotation can be seen as the product of two reflection, and we have the freedom to choose one of the reflection, except for the fact that its plane must contain the axis of the rotation.
Once you are convinced of this, if you have two rotations in 3D,and , you can fix a reflection along the plane defined by the axis of and , call it . So we have that
and
and therefore
is the product of two reflection and hence a rotation.
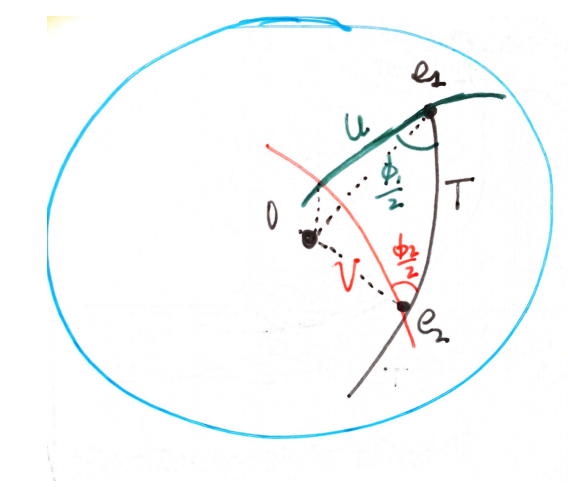
In the picture, we have expressed reflections by means of the intersection of their defining planes with a unitary sphere.
- We can express rotations by giving two points in a unitary sphere. This way, two points
and determine the rotation whose axis is the orthogonal line to the plane and whose angle is twice the distance from to (the arc of the great circle resulting from the intersection of plane with the sphere). Observe that giving a rotation, we have some freedom to choose one of the points. With this convention to define rotations, suppose you have two rotations and . We can choose the point of intersection of the two great circles defined by both rotations in the unitary sphere. Then we have two points and such that
and
This way, we get a spherical triangle
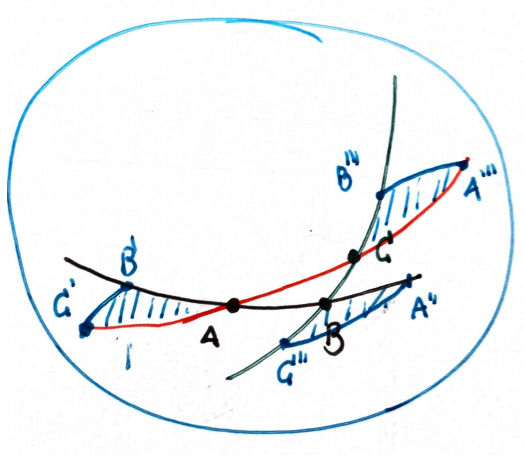
Triangles
More ideas about
The group
The group
The set of quaternions of modulus 1 is the 3-sphere
What is
First, it can be seen as a filled half sphere in which we identify the shell and the origin. Every interior point (vector) represent an axis of rotation and an angle of rotation (up to
It can be seen, also, like the 3D projective space,
Finally, think of the tangent space to
A chart for
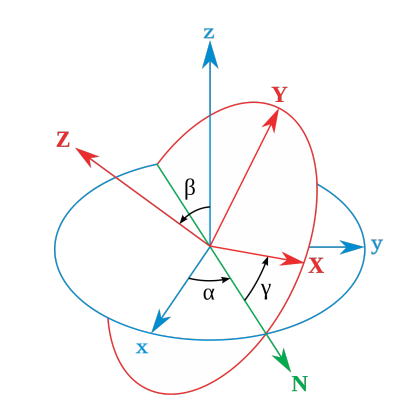
We can specify a general rotation
- A rotation along
of angle , to carry to . Say . - A rotation along
(the new ) of angle , to carry to . Call it . - A rotation along
(the new ) of angle , to carry to . Say .
This way,
This description has never satisfied me, because the axis of rotation are not defined "extrinsically", that is, they are not universal, they do not work for any rotation. They depends on the rotation in particular. But with a little of algebraic manipulation we can recycle these angles to use them with "standard rotations" along the axis
First, observe that
since we can express a rotation in a different axis "going and coming back".
Second, by the same reason,
But then,
And therefore our original rotation can be expressed with standard axis
The embedding in
with
Another chart: my approach
I guess this have a famous name but I don't know what is.
First, recall that a group can be seen as the set of frames of an associated homogeneous space (see this).
We can look at
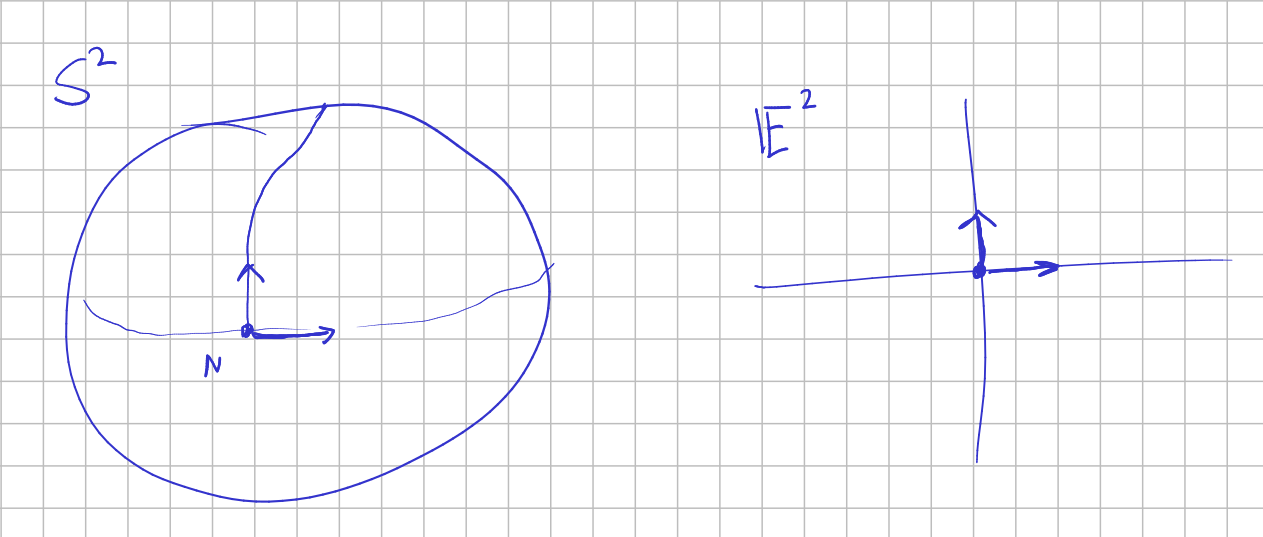
Any other frame consists of a similar data: another point and two orthogonal great circle segments. We carry the original frame to the latter by means of:
- A rotation on the
-axis, of certain magnitud - A choice of an axis
perpendicular to the -axis with an angle with the -axis. - A rotation on the axis
and certain magnitud .
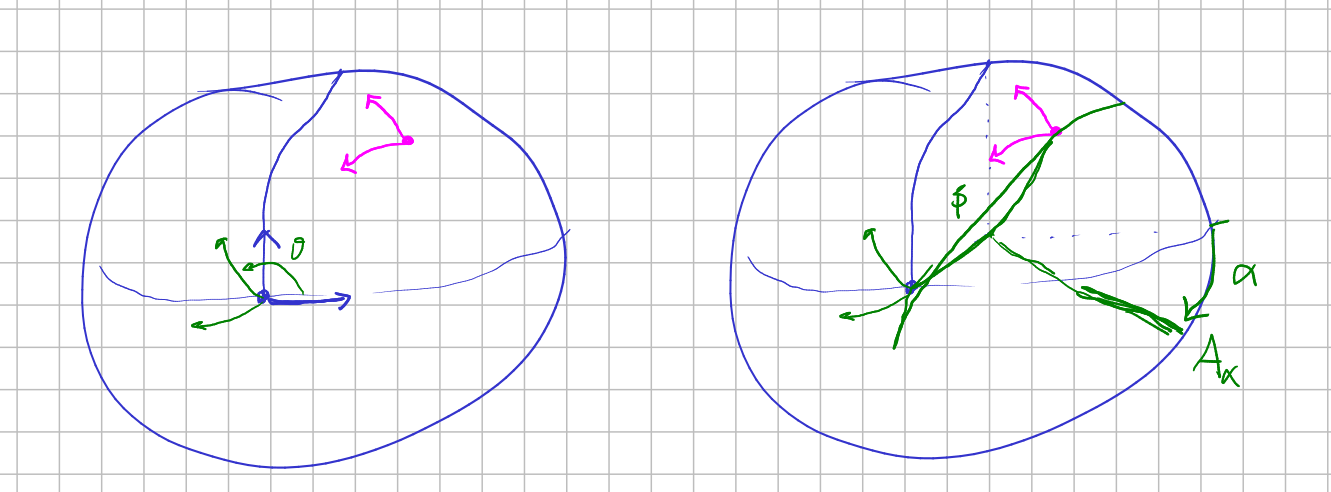
This is totally analogous to, where we perform a rotation in the origin followed by a translation . Both 's play the same rol, and the pair determines a kind of translation similar to .
We could even changeby , and this way the pair are similar to polar coordinates in the plane .
See maple 071 for the computation of the Maurer-Cartan form with this coordinates.
The axis angle representation
The axis angle representation is another chart for
where
which is called the Rodrigues formula. The matrix
And what about the Lie algebra
It is the same as the Lie algebra of O(3). An element of
and letting
we have that the elements of
where
It has the same Lie algebra as SU(2). See relation SO(3) and SU(2) for details.
The generators
The matrix (element of SO(3)) describing a counterclockwise rotation of angle
where