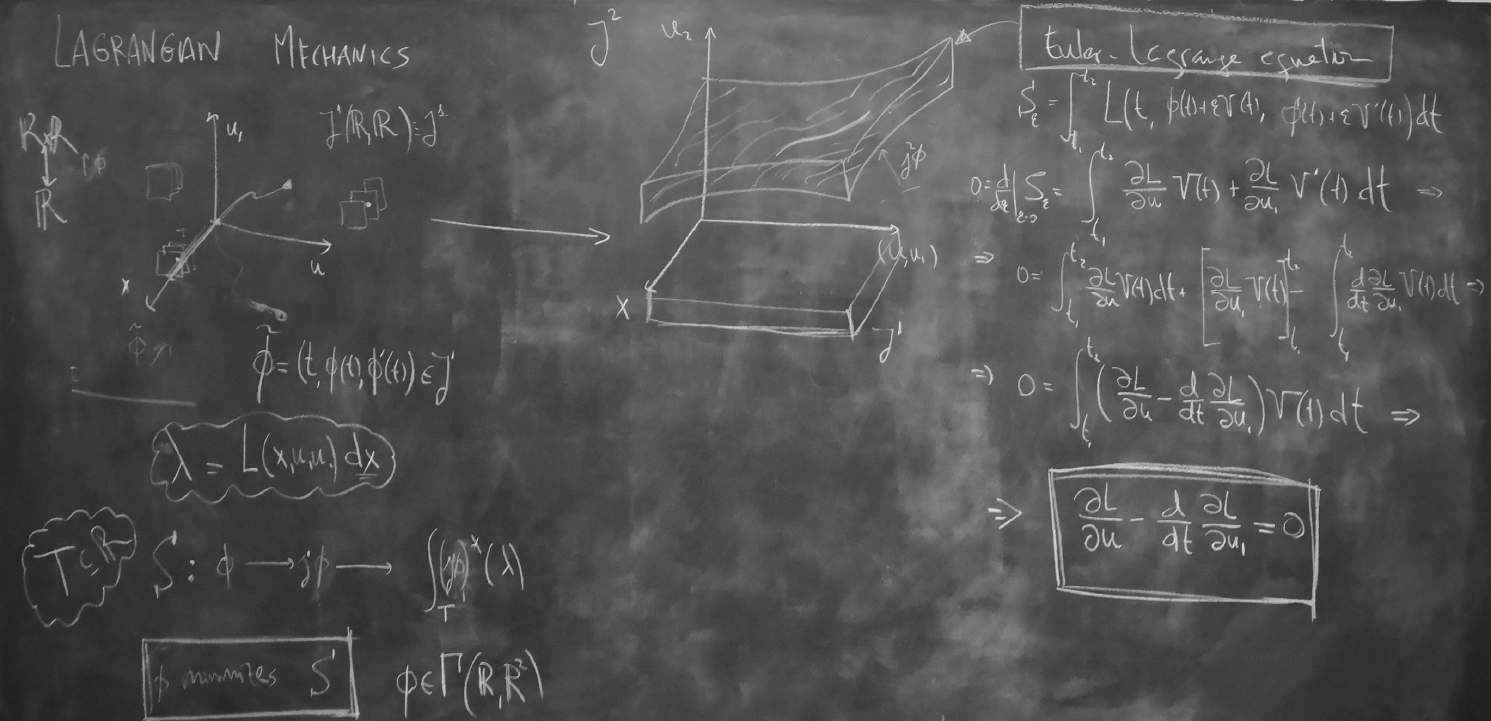
Lagrangian Mechanics
Key example: harmonic oscillator.
Classical approach
Is another formulation of Classical Mechanics.
This approach is very different from that of Newtonian mechanics, although it gives rise to an equivalent theory and solves the same problems. Firstly, the problems are rewritten in terms of generalized coordinates, not necessarily spatial (they can be distances, angles, etc.) and not necessarily Cartesian (polar, cylindrical or any other coordinate system that is convenient for solving the problem).
Such coordinates give rise to an abstract manifold denoted normally by
The principle of Lagrange and Hamilton, or the principle of least action, states that such a curve will be the one that minimizes the amount of "total Lagrangian". That is, for the system in question, is introduced a function
that measures, for each
Any curve-evolution
We assume that the solution curve is the one with the lowest or highest
Personal idea: I visualize the Lagrangian as a toll that must be paid for taking a certain path at a certain speed. We must try to minimize the payment (or sometimes maximize it). From this point of view, the Lagrangian is like a kind of Riemannian metric, and we are computing a geodesic. This is not, of course, the case except in some cases. I think this has to do with Finsler manifolds...
Therefore, every system of Lagrangian Mechanics is a particular case of a variational problem.
A way to find the minimum or maximum of
This equation implies Newton second law when we take
so
Jet space approach
From the point of view of the jet bundles, we have what follows.
We have the configuration manifold
Physics is introduced by the Lagrangian, which is an horizontal 1-form on the first order jet bundle
Given a general curve
The important sections
being
The condition of
So we can define a map
that codifies the Euler-Lagrange equations associated to a Lagrangian
Therefore, our Lagrangian (and the principle of least action) defines a submanifold
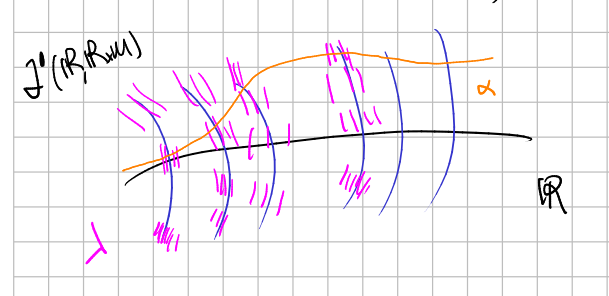
Given a curve
may or may not live inside
(pizarra_016)
I have a visualization of the relation of minimizing the action with satisfying Euler-Lagrange in xournal_154, although it is done from a "discrete point of view".
On the other hand, I guess that a group symmetry for the Lagrangian
Other facts
Besides the equations of motion you have holonomic constraints or nonholonomic constraints.
Several Lagrangians can give rise to the same theory: equivalent Lagrangians