The three models of surfaces can be seen within a common framework.
Let's consider the space , that is, the manifold with coordinates but with the pseudo-Riemannian metric given in each tangent space by
This space with this pseudo-metric is called Minkowski space, and can be also denoted by .
This metric is left invariant by the group when acting on . It also leaves invariant the cone
so is logical that we pay attention to it, because it is very "physical": the group represents all the change of point of view of a physical observer, that is, rotations and Lorentz boost.
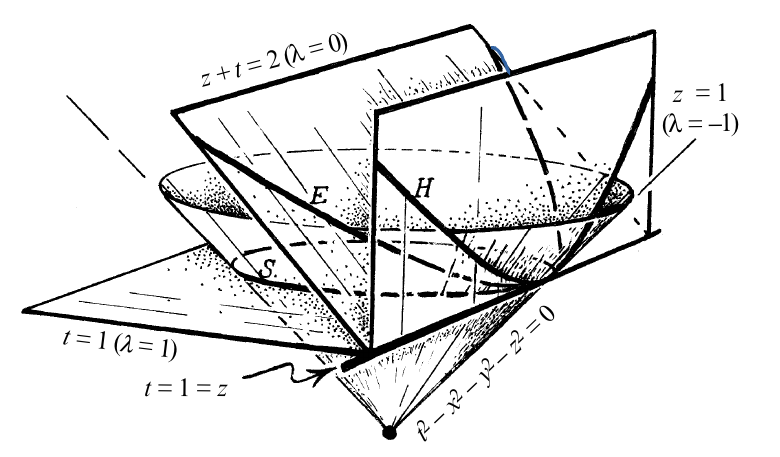
Now, following [TRTR] from Penrose page 423, we can consider the family of hyperplanes inside given by
intersecting our cone in different 2-dimensional submanifolds of .
Here we have a picture from that book, where we consider only for purposes of drawability.
If we analyse the case , we observe that we obtain the submanifold , in the picture with a shape of a parabola, given by the embedding
We can look for the (possibly pseudo) Riemannian metric inherited by . Since
we conclude that consists of with the euclidean metric:
That is, although we see it like a parabola, intrinsically is only the Euclidean plane, and that is the reason the latter is sometimes called parabolic geometry.
But, what happens for others ? Let's see. We have a far more complicated parametrization of our embedded manifold:
(computations made with Mathematica).
If we compute the (possibly pseudo) Riemannian metric in this chart we obtain the inherited metric in
Next step is to show that for we have an isometry into the usual sphere (a model for spherical geoemtry), and that for we have an isometry into a model for hyperbolic geometry. This would justify the terms elliptic and hyperbolic for those geometries, as you can see at the picture above ( and respectively). In order to keep it simple we can work with and .
For , we have
But if we look at a typical chart of the usual sphere in
and compute the metric we obtain just
so they are the same.
And for we have
But if we look at the typical model for hyperbolic plane that consists of the pseudosphere embedded in :
with a chart given by
we obtain the inherited metric in (keep an eye: inherited from the Minkowski metric, not the Euclidean one):