Proposition
Given a group action free and transitive, fixed we have a bijection
with
See principal homogeneous spaces in homogeneous space .
This result can be proven easily and let us use the manifold to visualize .
If the action is not free (but still transitive), we cannot visualize (for example, acting over ). Anyway, observe first that the stabilizer of every are all conjugate of each other. And second, if we fix , we can establish a surjection , , that gives rise to a bijection
From here we have a natural bijection
that could be translated to a bijection
if we had a \textit{preferred choice} of a such that for every (need to be proven but I think is easy). Take ...
In this circumstances, we can even define an action of at :
But it is not necessarily transitive or free.
But on the other hand, since the action of on itself is free and transitive, we can copy this action to with the previous bijection and obtain a new action on
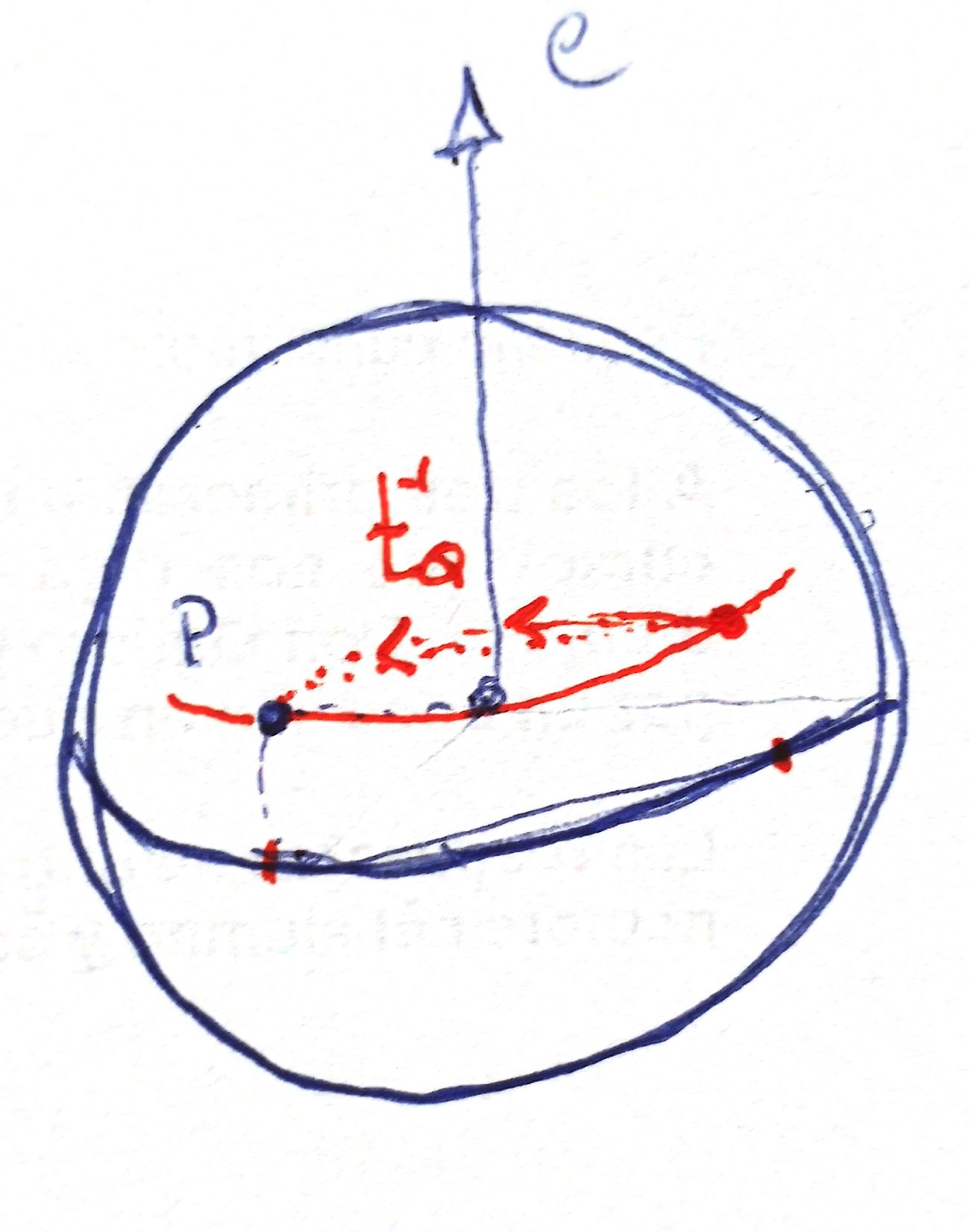
For example, we can see as the sphere bundle of . Remember
This is this way because if we fix a point in and define taking the action on , we have the bijection of with and, even more, we have preferred transformations from one point to another: the great circle paths \textbf{with angle lesser or equal to }. So (following result above) we have
given explicitly by
where is the great circle path from to .
This bijection is, indeed, a diffeomorphism, as can be proven with the map
that sends the pair of vectors in to the orthogonal matrix .
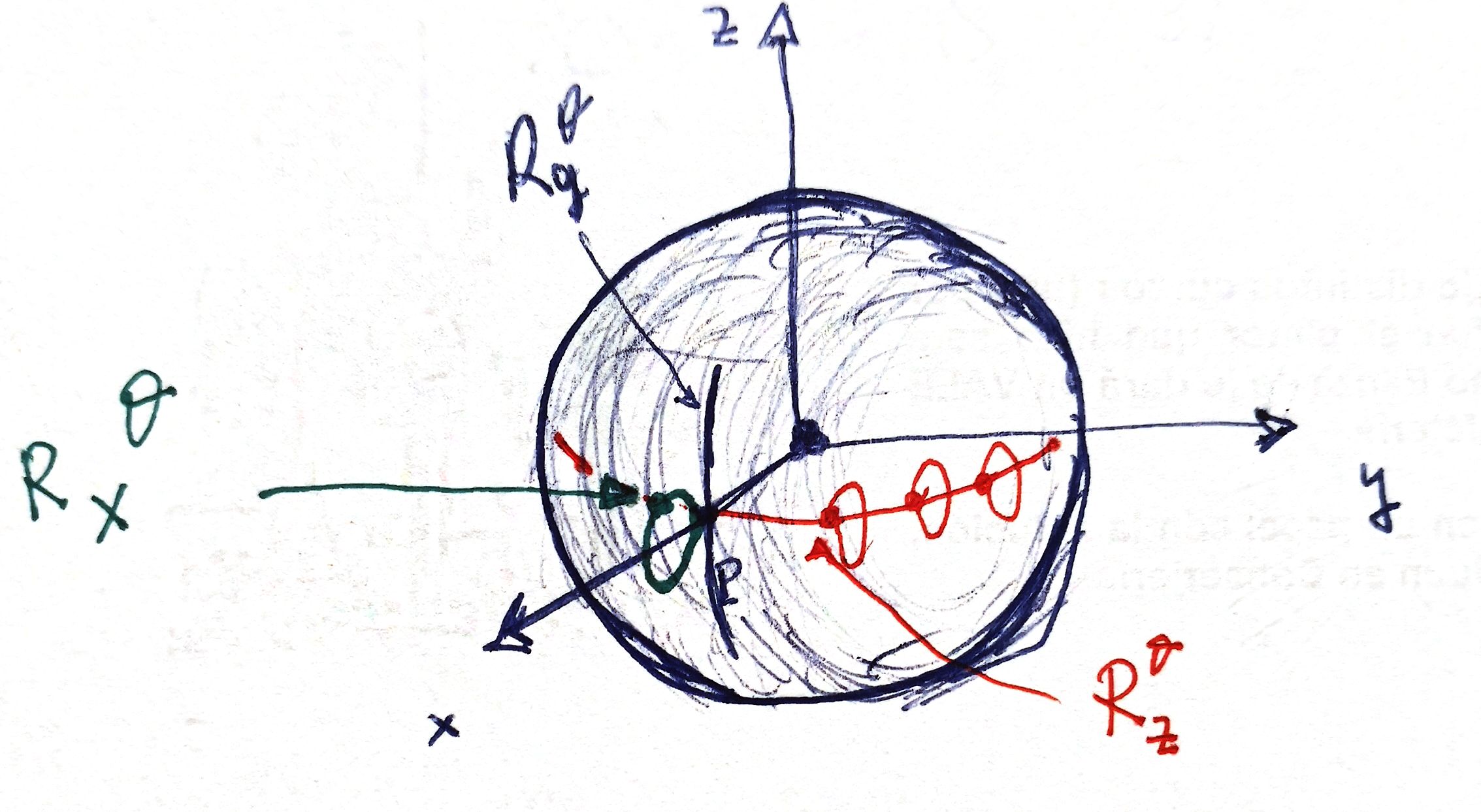
But let's return to our original map and take and think of several examples to \textit{see} the elements of .
The identity corresponds to itself with the identity in .
Rotation of axis and angle , , corresponds to .
Rotation of axis and angle , , corresponds to .
Rotation of axis and angle , , corresponds to .
In general, rotation through an axis no orthogonal to yields where and , with an angle that measures how much deviates from the great circle corresponding to the axis .
Hypothesis: a point comes from the composition of the rotation with a rotation of angle an axis itself...
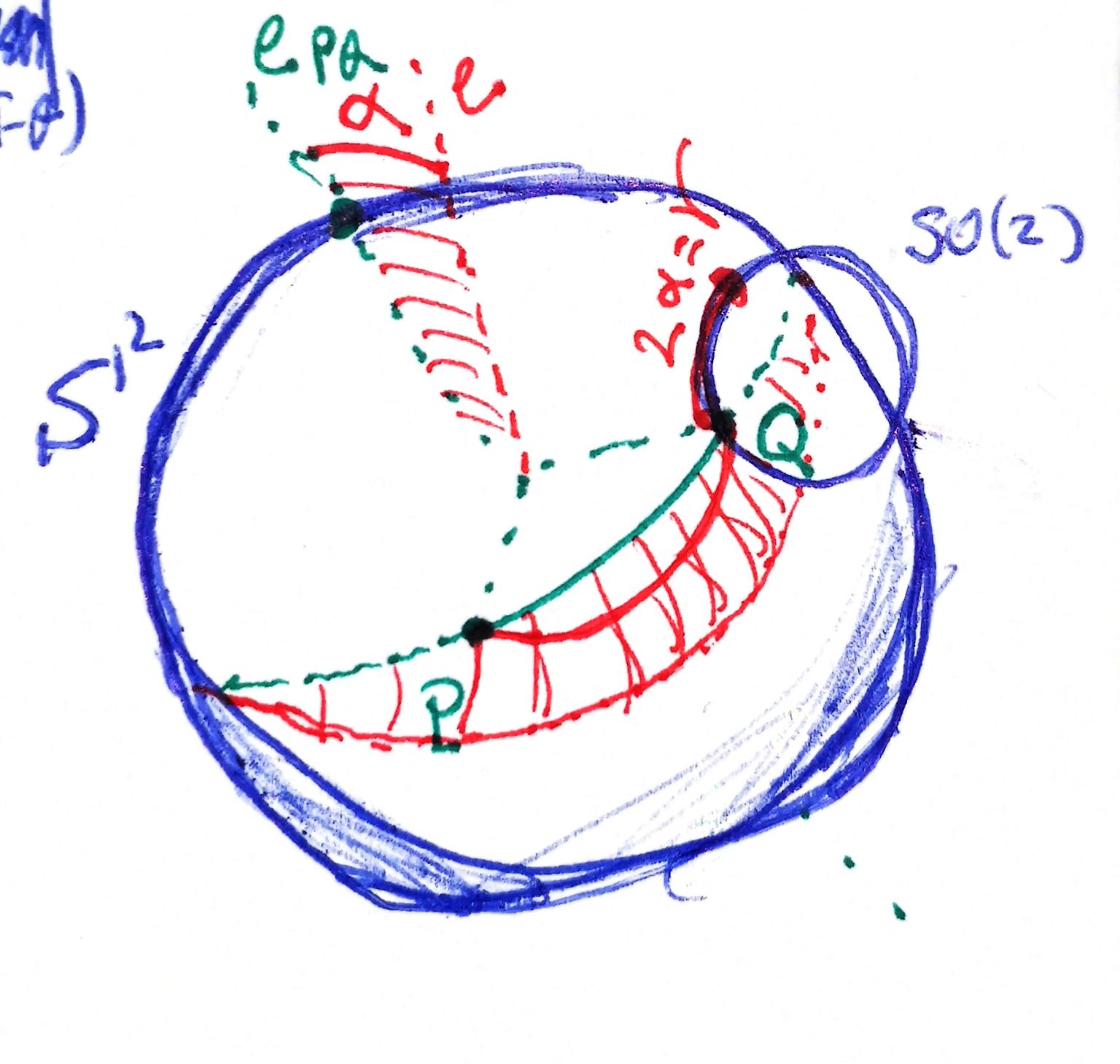
To sum up, we would have something like this: fixed , rotations around great circles passing through and angle are encoded in the arrival point of , . If the rotation is not along a great circle, is encoded in the same final point but with an \textit{internal rotation} of angle (i.e., an element of the of ) related to the angular displacement of the axis of the rotation respect to the ideal great circle rotation taking to with angle lesser than . By mean of examples I guess that :
Possible rotations other than the great circle of axis taking to arise when we choose a different axis along the \textit{perpendicular bisector} of . The extremal case is when (), and then they begin to be repeated (although in a complementary way).
Keep an eye: this is not diffeomporhic to the 3-sphere . is diffeomorphic to the covering group, the double cover of . See unitary matrix#Unitary matrix#What is SU 2 topologically.